La détection par ultrasons est le plus couramment utilisée dans les applications industrielles pour détecter les pistes cachées, les discontinuités dans les métaux, les composites, les plastiques, les céramiques et pour la détection du niveau d'eau. A cet effet, les lois de la physique qui indiquent la propagation des ondes sonores à travers les matériaux solides ont été utilisées depuis que les capteurs à ultrasons utilisent le son au lieu de la lumière pour la détection.
Quel est le principe de la détection par ultrasons?
Définition de l'onde sonore
Le son est une onde mécanique traversant les milieux, qui peut être un solide, un liquide ou un gaz. Les ondes sonores peuvent traverser les milieux à une vitesse spécifique qui dépend du milieu de propagation. Les ondes sonores qui ont une fréquence élevée se reflètent à partir des limites et produisent des motifs d'écho distinctifs.
Lois de la physique pour les ondes sonores
Les ondes sonores ont des fréquences ou un nombre d'oscillations spécifiques par seconde. Les humains peuvent détecter des sons dans une gamme de fréquences d'environ 20 Hz à 20 KHz. Cependant, la gamme de fréquences normalement utilisée détection par ultrasons est de 100 KHz à 50 MHz. La vitesse des ultrasons à un moment et à une température particuliers est constante dans un milieu.
W = C / F (ou) W = CT
Où W = longueur d'onde
C = Vitesse du son dans un milieu
F = Fréquence de l'onde
T = Période de temps
Les méthodes les plus courantes d'examen par ultrasons utilisent des ondes longitudinales ou des ondes de cisaillement. L'onde longitudinale est une onde de compression dans laquelle le mouvement des particules est dans le même sens que l'onde de propagation. L'onde de cisaillement est un mouvement d'onde dans lequel le mouvement des particules est perpendiculaire à la direction de propagation. La détection par ultrasons introduit des ondes sonores à haute fréquence dans un objet de test pour obtenir des informations sur l'objet sans l'altérer ou l'endommager de quelque manière que ce soit. Deux valeurs sont mesurées en détection ultrasonique.
Le temps nécessaire au son pour traverser le milieu et l'amplitude du signal reçu. Sur la base de la vitesse et du temps, l'épaisseur peut être calculée.
L'épaisseur du matériau = Vitesse du son du matériau X Temps de combat
Transducteurs pour la propagation des ondes et la détection de particules
Pour envoyer des ondes sonores et recevoir un écho, des capteurs à ultrasons, normalement appelés émetteurs-récepteurs ou transducteurs, seront utilisés. Ils fonctionnent sur un principe similaire au radar qui convertira l'énergie électrique en énergie mécanique sous forme de son, et vice versa.
Les transducteurs couramment utilisés sont les transducteurs de contact, les transducteurs à faisceau angulaire, les transducteurs à ligne à retard, les transducteurs à immersion et les transducteurs à double élément. Les transducteurs de contact sont généralement utilisés pour localiser les vides et les fissures sur la surface extérieure d'une pièce ainsi que pour mesurer l'épaisseur. Les transducteurs à faisceau angulaire utilisent le principe de la réflexion et de la conversion de mode pour produire un cisaillement réfracté ou des ondes longitudinales dans le matériau d'essai.
Les transducteurs à ligne à retard sont des transducteurs à ondes longitudinales à élément unique utilisés en conjonction avec une ligne à retard remplaçable. L'une des raisons du choix d'un transducteur à ligne à retard est que la résolution proche de la surface peut être améliorée. Le retard permet à l'élément d'arrêter de vibrer avant qu'un signal de retour du réflecteur puisse être reçu.
Les principaux avantages offerts par les transducteurs à immersion par rapport aux transducteurs de contact sont le couplage uniforme réduit les variations de sensibilité, la réduction du temps de balayage et augmente la sensibilité aux petits réflecteurs.
Fonctionnement des capteurs à ultrasons:
Lorsqu'une impulsion électrique de haute tension est appliquée au transducteur à ultrasons, elle vibre à travers un spectre spécifique de fréquences et génère une rafale d'ondes sonores. Chaque fois qu'un obstacle vient devant le capteur à ultrasons, les ondes sonores se reflètent sous forme d'écho et génèrent une impulsion électrique. Il calcule le temps écoulé entre l'envoi des ondes sonores et la réception de l'écho. Les modèles d'écho seront comparés aux modèles d'ondes sonores pour déterminer l'état du signal détecté.
3 Applications impliquant la détection par ultrasons:
La distance d'obstacle ou de discontinuités dans les métaux est liée à la vitesse des ondes sonores dans un milieu à travers lequel les ondes sont passées et au temps nécessaire à la réception de l'écho. Ainsi, la détection ultrasonore peut être utilisée pour trouver les distances entre les particules, pour détecter les discontinuités dans les métaux et pour indiquer le niveau de liquide.
- Mesure de distance par ultrasons
Les capteurs à ultrasons sont utilisés pour les applications de mesure de distance. Ces gadgets transmettent régulièrement une courte rafale de son ultrasonique à une cible, qui renvoie le son vers le capteur. Le système mesure ensuite le temps de retour de l'écho vers le capteur et calcule la distance à la cible en utilisant la vitesse du son dans le milieu.
Différents types de transducteurs sont utilisés dans les dispositifs de nettoyage à ultrasons accessibles industriellement. Un transducteur à ultrasons est fixé à un bac en acier inoxydable qui est rempli d'un solvant et une onde carrée lui est appliquée, conférant une énergie de vibration au liquide.

Capteur de distance à ultrasons
Les capteurs de distance à ultrasons mesurent la distance à l'aide d'un sonar, un battement ultrasonique (bien au-dessus de l'audition humaine) est transmis de l'unité et la distance à la cible est déterminée en mesurant le temps nécessaire pour le retour d'écho. La sortie du capteur à ultrasons est un battement de largeur variable qui se compare à la distance à la cible.
8 Caractéristiques du capteur de distance à ultrasons:
- Tension d'alimentation: 5V (DC).
- Courant d'alimentation: 15mA.
- Fréquence de modulation: 40Hz.
- Sortie: 0 - 5V (sortie haute lorsqu'un obstacle détecté dans la plage).
- Angle de faisceau: 15 degrés maximum.
- Distance: 2cm - 400cm.
- Précision: 0,3 cm.
- Communication: impulsion TTL positive.
Fonctionnement du capteur de distance à ultrasons:
Le module de capteur à ultrasons comprend un émetteur et un récepteur. L'émetteur peut fournir un son ultrasonique de 40 KHz tandis que le récepteur maximum est conçu pour n'accepter que des ondes sonores de 40 KHz. Le capteur à ultrasons du récepteur qui se trouve à côté de l'émetteur pourra ainsi recevoir 40 KHz réfléchis, une fois que le module fait face à un obstacle en face. Ainsi, chaque fois qu'un obstacle vient devant le module à ultrasons, il calcule le temps nécessaire entre l'envoi des signaux et leur réception puisque le temps et la distance sont liés pour les ondes sonores traversant le milieu aérien à 343,2 m / s. Lors de la réception du signal, le programme MC en cours d'exécution affiche les données, c'est-à-dire la distance mesurée sur un écran LCD interfacé avec le microcontrôleur en cm.

Circuit de capteur de distance ultrasonique
De manière caractéristique, les applications robotiques sont très populaires, mais vous trouverez également ce produit utile dans les systèmes de sécurité ou comme remplacement infrarouge si vous le souhaitez.
- Transducteur ultrasonique pour la détection du niveau d'eau

Détection ultrasonique
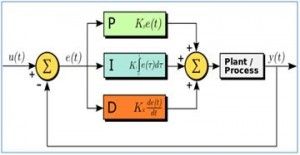
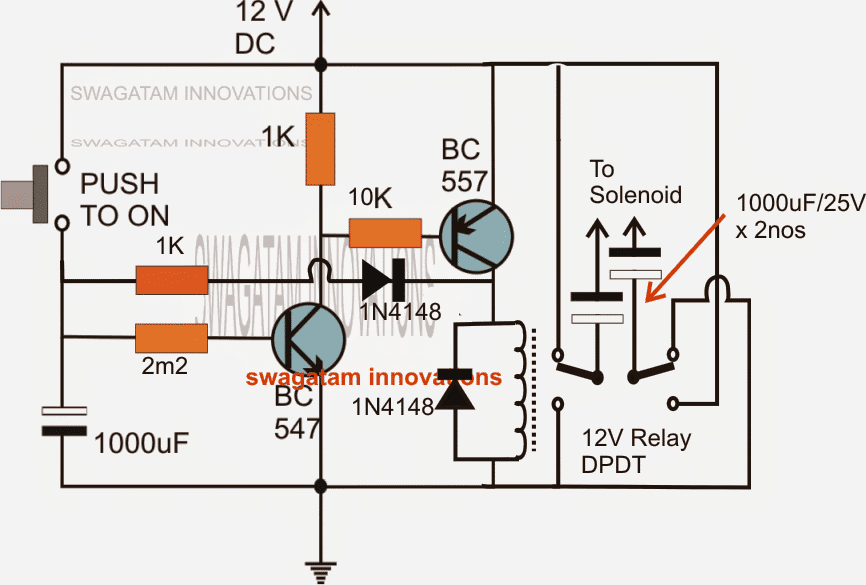
Schéma fonctionnel du contrôleur de niveau de liquide sans contact

contrôleur de niveau de liquide sans contact
Le schéma ci-dessus montre le contrôleur de niveau de liquide sans contact dans ce schéma, le module de capteur à ultrasons est interfacé avec le microcontrôleur. Chaque fois que la distance de niveau mesurée en cm tombe en dessous d'un point de consigne, la pompe commence par détecter le signal sortant et recevant le niveau provenant du transducteur à ultrasons qui est alimenté au microcontrôleur. Lorsque le microcontrôleur reçoit le signal du transducteur à ultrasons, il active le relais via un MOSFET qui a activé ou désactivé la pompe.
- Détection d'obstacles par ultrasons
Des capteurs à ultrasons sont utilisés pour détecter la présence de cibles et pour mesurer la distance par rapport aux cibles dans de nombreuses usines de traitement et usines de traitement robotisées. Des capteurs avec une sortie numérique ON ou OFF sont disponibles pour détecter la présence d'objets et des capteurs avec une sortie analogique qui change par rapport à la distance de séparation capteur-cible sont disponibles dans le commerce.

Le capteur d'obstacles à ultrasons se compose d'un ensemble de récepteur et d'émetteur à ultrasons qui fonctionnent à la même fréquence. Le moment où quelque chose bouge dans la zone sécurisée, le décalage fin du circuit est aggravé et le buzzer / alarme est déclenché.

Capteur d'obstacles à ultrasons
Caractéristiques:
- Consommation d'énergie de 20mA
- Communication impulsion entrée / sortie
- Angle d'acceptation étroit
- Fournit des estimations exactes de séparation sans contact entre 2 cm et 3 m
- La LED du point d'explosion montre les estimations de l'avancement
- L'en-tête à 3 broches facilite la connexion à l'aide d'un lien de développement servo
Caractéristiques:
- Alimentation: 5V DC
- Courant de repos:<15mA
- Angle effectif:<15°
- Distance de télémétrie: 2cm - 350 cm
- Résolution: 0,3 cm
- Cycle de sortie: 50 ms
Le capteur détecte les objets en émettant une courte rafale ultrasonique puis en écoutant l'éco. Sous le contrôle d'un microcontrôleur hôte, le capteur émet une courte explosion de 40 kHz. Cette explosion s'aventure ou se propage dans l'air heurte un article et rebondit à nouveau vers le capteur.
Le capteur fournit une impulsion de sortie à l'hôte qui se terminera lorsque l'écho est détecté, par conséquent la largeur d'une impulsion à la suivante est prise en compte dans le calcul par un programme pour fournir des résultats à une distance de l'objet.
Vous avez maintenant compris les applications et le concept de base de la détection par ultrasons si vous avez des questions sur ce sujet ou sur l'électrique et contrôleur de niveau de liquide sans contact laissez la section commentaires ci-dessous.