Le message explique un simple obstacle évitant le circuit du robot sans microcontrôleur et sans utiliser de circuits de commande de moteur ou de circuits intégrés spéciaux. L'idée a été demandée par M. Faiyyaz
La conception
Fondamentalement, c'est sous la forme d'un véhicule en mouvement qui est capable de détecter et d'éviter les obstacles potentiels sur sa trajectoire et de changer sa direction de manière appropriée pour que son mouvement reste ininterrompu, simple!
L'opération est ainsi automatique sans aucune intervention manuelle ou humaine.
L'idée présentée d'un robot évitant un obstacle sans microcontrôleur comme son nom l'indique n'emploie pas de microcontrôleur et est donc extrêmement simple à construire et convient à tout nouvel amateur.
Lors de la conception du circuit, j'ai réalisé que pour mettre en œuvre le principe, au moins deux modules de capteur d'obstacles seraient nécessaires, car l'utilisation d'un seul module peut provoquer un mouvement erratique du moteur et peut ne pas aider à un détournement ou une rotation en douceur du véhicule vers un chemin libre.
La configuration du moteur du véhicule est assez similaire à la voiture jouet télécommandée dont j'avais discuté dans l'un des articles précédents.
Le schéma suivant représente l'un des modules du système, et par conséquent deux ou une paire de ces modules seraient nécessaires sur les côtés droit et gauche du véhicule.
L'idée est simple et fonctionne sans microcontrôleur et sans circuits intégrés de commande de moteur spéciaux. Cela signifie que vous pouvez le faire sans aucun type de codage et sans utiliser aucun type de circuit intégré de pilote de moteur complexe ..... et le circuit vous permet d'utiliser n'importe quel moteur à courant continu quelle que soit sa puissance, de sorte que même les véhicules à haute puissance évitant les obstacles pourraient être fabriqués à l'aide de ce circuit qui sont normalement utilisés dans les centres commerciaux et les points de vente similaires.
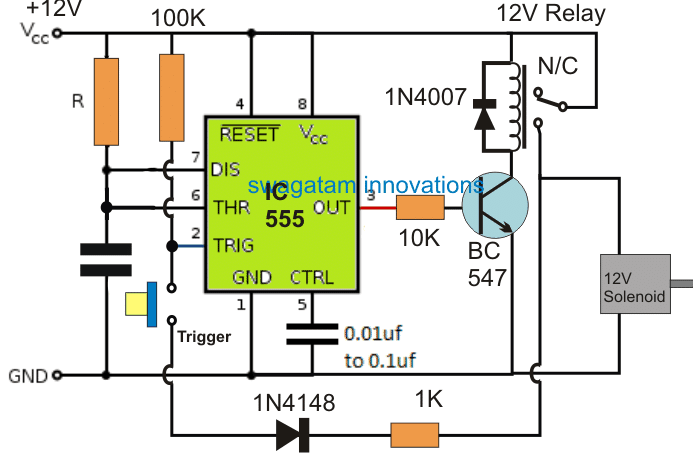
Schéma

Essayons maintenant de comprendre le circuit ci-dessus à l'aide de l'explication suivante:
Comment ça fonctionne
L'IC 555 est configuré comme un émetteur IR et est réglé pour générer une fréquence constante de 38 kHz, tandis que le circuit transistorisé adjacent est configuré en tant qu'étage récepteur ou étage de capteur IR.
Supposons que ce soit le module du côté droit, et supposons que ce module soit le premier à détecter un obstacle sur le chemin.
Par conséquent, dès qu'un obstacle est détecté, la fréquence de 38 kHz générée par le 555 IC est réfléchie vers le capteur du circuit récepteur adjacent.
Le récepteur active instantanément les transistors associés de telle sorte que le transistor d'attaque final est empêché de conduire.
Or le moteur qui est commandé par ce transistor est censé être situé du côté gauche du véhicule, c'est-à-dire du côté opposé de ce module ... de même le moteur situé du côté droit est en fait contrôlé par le module latéral gauche .
Par conséquent, lorsque le module de détection d'obstacle du côté droit supposé ci-dessus s'active, il arrête le moteur du côté gauche, tandis que le moteur du côté droit est autorisé à se déplacer normalement.
Cette situation oblige le véhicule à prendre une déviation du côté gauche ... ce qui signifie que maintenant le module de gauche supposé commence à recevoir des signaux d'obstacle encore plus forts et continue de forcer le véhicule à avancer plus fort sur la déviation en cours jusqu'à ce qu'il ait complètement évité l'obstacle. . Le module cesse maintenant de recevoir les signaux d'obstacle et le véhicule commence à avancer normalement sur sa nouvelle trajectoire.
Tandis que le détournement ci-dessus est effectué, le module latéral gauche est obligé de devenir de plus en plus isolé et éloigné de l'obstacle afin qu'il n'ait pas l'occasion d'interférer dans la procédure et de permettre un détournement propre et en douceur du véhicule.
Exactement les mêmes procédures sont mises en œuvre dans le cas où le module du côté gauche détecte l'obstacle devant le module du côté droit, dans lequel le véhicule est forcé de se déplacer de plus en plus fort vers le côté droit.
Nous pouvons également voir un étage de circuit de «désactivation» dans le module qui sont interconnectés entre les modules latéraux gauche et droit. Cette étape est intentionnellement introduite pour s'assurer que les deux modules ne sont jamais activés ensemble.
Ainsi par exemple si le module latéral gauche devient le premier à détecter un obstacle, il désactive immédiatement le module latéral droit et initie le détournement du véhicule sur la droite et vice versa.
Le circuit intégré du capteur pourrait être un série TSOP17XX standard
Pour plus d'informations sur le circuit intégré du capteur ci-dessus, vous pouvez apprendre comment connecter TSOP1738 IC
Et le moteur doit être équipé de boîtes de vitesses afin que le mouvement soit initialement maintenu à un niveau contrôlé.
Configuration de la roue
La configuration complète du module gauche et droit et les connexions électriques associées peuvent être observées dans la figure ci-dessous:

Mettre à jour
Un peu de réflexion nous indique que le simple circuit de robot évitant les obstacles ci-dessus pourrait également être mis en œuvre en utilisant un seul module, au lieu des deux.
Cependant, un module unique permettrait au véhicule d'effectuer un détournement unilatéral à chaque fois qu'il détecte un obstacle, par conséquent le système pourrait être configuré pour prendre un détournement dans le sens horaire ou dans le sens antihoraire en fonction du moteur connecté au circuit pour les actions.
L'exemple de configuration peut être visualisé dans l'image suivante:

Cependant, il semble qu'il y ait un problème avec la configuration du moteur unique ci-dessus. Supposons que le véhicule rencontre un coin à angle droit sur le côté gauche. Cela forcera le véhicule à continuer à se déplacer dans le sens inverse des aiguilles d'une montre, jusqu'à ce qu'il fasse demi-tour et recommence à reculer dans la même direction d'où il avait commencé. Ce n'est pas quelque chose que l'utilisateur apprécierait.
Précédent: Résistances SMD - Introduction et fonctionnement Suivant: Comment fonctionne un accéléromètre
![Circuit de fleurs à LED scintillantes [Effet de lumière LED multicolore]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)