Les robots peuvent être utilisés dans de nombreuses applications dans les industries, militaires, domestiques. L'une des principales utilisations des robots est un atout pour les êtres humains. Qu'il s'agisse de situations dangereuses telles qu'un incendie ou un endroit rempli de mines terrestres, les robots peuvent facilement trouver un moyen de résoudre ces problèmes. Voyons donc ces deux types de robots - un robot de détection de mines terrestres et un robot de lutte contre l'incendie
Robot de détection de mines terrestres
Comment détecter une mine terrestre avec des robots?
L'une des applications les plus importantes de la robotique est la défense. Un robot dans l'armée est un véhicule télécommandé avec de nombreuses caractéristiques uniques. Il peut s'agir d'un véhicule robotique avec une caméra pour espionner, d'un véhicule robotique avec un pistolet LASER pour détecter et détruire des cibles, ou d'un robot avec un Détecteur de métaux détecter la présence de mines terrestres.
L'un des moyens traditionnels et conventionnels de détection des mines consiste à utiliser des personnels formés qui recherchent manuellement des métaux ou des mines à l'aide d'un détecteur de métaux. Cependant, cela est dangereux, coûteux et lent.
Pour surmonter ce problème, un système beaucoup plus avancé est préféré.
Quelques façons de détecter les mines terrestres:
- Utilisation d'un robot qui peut insérer une sonde dans le sol qui peut détecter les objets sous le sol et déterminer le type de matériau.
- Utilisation d'un robot avec un détecteur de métaux qui peut détecter la présence d'éléments conducteurs comme les mines terrestres et alerter l'utilisateur.
Avant d'aller plus loin dans les détails du deuxième type - c'est-à-dire le robot avec un détecteur de métaux, rappelons brièvement les deux termes importants - Mines terrestres et Détecteur de métaux.
À Mine terrestre est un engin explosif placé délibérément sous le sol qui explose lorsqu'il est déclenché par la pression. Selon un rapport statistique, il existe environ 100 millions de mines terrestres dans 70 pays à travers le monde. Une fois placée, une mine terrestre peut fonctionner jusqu'à 50 ans. N'est-ce pas dangereux !!

Un détecteur de métaux de base fonctionne sur le principe de la loi d'induction de Faraday. Il se compose d'une bobine qui est excitée pour développer un champ magnétique pulsé autour d'elle. Lorsque la bobine vient à proximité d'un élément conducteur comme le métal (une mine), un courant électrique (courant de Foucault) y est induit. Le courant de Foucault induit provoque le développement d'un champ électromagnétique autour du métal, qui est retransmis à la bobine qui développe un signal électrique qui est analysé. La distance entre la bobine et le métal est plus grande, plus le champ magnétique est faible.
Un prototype simple:

Un prototype simple de véhicule robotique avec détecteur de métaux
Conception du robot:
Le véhicule robotique se compose des unités suivantes:
- Une base rectangulaire pour supporter toute la structure du robot, fixée avec deux roues pour le mouvement.
- Quelques moteurs à courant continu pour fournir le mouvement requis au robot.
- Une unité de commande constituée d'un récepteur RF qui reçoit des signaux de commande d'une unité émettrice pour commander le pilote de moteur et commander les moteurs en conséquence.
- Un circuit de détecteur de métal avec une alarme sonore est déclenché une fois que le métal est détecté.
Comment fonctionne le robot:
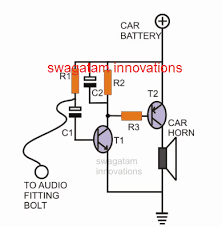
Le circuit de détecteur de métal intégré sur le circuit de commande du robot se compose d'un transistor qui est entraîné par un circuit oscillateur accordé constitué de la bobine. Lorsqu'un métal est détecté et que le courant électrique est retransmis à travers la bobine, le transistor1 est à l'état passant et entraîne un autre transistor2 à l'état bloqué. Ce transistor3, à son tour, entraîne un autre transistor à l'état bloqué. Ce transistor particulier 3 est connecté à un autre transistor4 qui est connecté de telle sorte qu'il est à l'état passant lorsque son transistor d'attaque3 est à l'état bloqué. Le transistor 4 est connecté de telle sorte qu'à l'état passant, le buzzer et la LED reçoivent une polarisation appropriée et commencent à conduire.

Schéma fonctionnel de l'unité de détection de métaux
La LED commence à briller et le buzzer se met à sonner. Ainsi, lorsqu'un métal est détecté, l'alarme sonore se met à sonner et la LED s'allume.
Contrôle du robot:
Le prototype simple peut être contrôlé à l'aide de la communication RF, qui est un système de communication à courte portée. Les commandes sont transmises à l'aide d'un émetteur et reçues par un récepteur embarqué sur le circuit du robot pour contrôler le mouvement du robot.

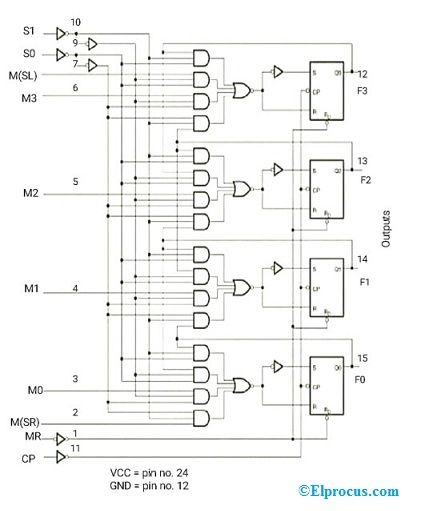
Schéma fonctionnel de la section émetteur
L'émetteur se compose d'un ensemble de boutons poussoirs comme avant, arrière, arrêt, gauche et droite qui sont pressés pour fournir le mouvement du robot dans n'importe quelle direction souhaitée. Les boutons poussoirs sont connectés au port d'entrée du microcontrôleur. Le microcontrôleur lors de la réception de ces signaux développe un signal de 4 bits correspondant sous forme parallèle à travers un autre port E / S, auquel un codeur IC est connecté. Le codeur convertit ces signaux en une forme série de données. L'émetteur RF module ces données série, qui sont transmises par l'antenne.

Schéma fonctionnel de la section récepteur
La section récepteur montée sur le robot est constituée du récepteur RF qui démodule ce signal. Le décodeur IC reçoit ce signal sous forme série et développe une donnée parallèle de 4 bits correspondante à sa sortie. Le microcontrôleur reçoit ces données et fournit en conséquence un signal de commande au circuit de commande de moteur LM293D, qui entraîne les deux moteurs.
Véhicule robotique de lutte contre l'incendie:
Le concept de véhicule robotique anti-incendie se bat dans un incendie. Ces dernières années, il y a eu plusieurs accidents graves, notamment des incendies et des explosions de bombes. Nous avons été au courant des accidents d'incendie majeurs comme les centrales nucléaires, le pétrole, les réservoirs de gaz et les usines chimiques, les entreprises industrielles d'incendie à grande échelle dans ces endroits une fois que l'incendie a commencé, peut en résulter est très grave. Des milliers de personnes sont mortes dans cette incidence. C'est un combat d'incendie véhicule robotique La technologie. Ce véhicule robotique avait l'habitude de trouver le feu et de lutter contre les incendies.

Véhicule robotique de lutte contre l'incendie
Principe de fonctionnement du véhicule robotique de lutte contre l'incendie:
Le véhicule robot chargé avec un camion-citerne à eau. La pompe est contrôlée par communication sans fil (RF et communication mobile). L'extrémité émetteur connectée aux boutons poussoirs. En utilisant ce bouton-poussoir, les commandes sont envoyées au récepteur et contrôlent le moment du robot comme avant, arrière, gauche, droite. L'extrémité de réception trois moteurs sont connectés au microcontrôleur.

Schéma fonctionnel de l'émetteur

Schéma fonctionnel du récepteur
L'émetteur RF agit comme une télécommande RF où la portée est de 200 mètres. Dans la maison, les bureaux et les industries, les capteurs d'incendie sont conservés à certains endroits lorsqu'un incendie se produit à proximité d'un capteur d'incendie. Les capteurs donnent le sentiment que le bit correspondant est transmis au récepteur RF. Le récepteur RF est intégré à un microcontrôleur. Lorsque le récepteur RF reçoit les signaux que les informations passent au microcontrôleur, le robot se dirige vers des capteurs d'incendie. Les emplacements des capteurs sont stockés dans le microcontrôleur. Une fois que le robot atteint l'emplacement souhaité, le robot s'arrête et active le pulvérisateur pour ce feu. Après avoir tiré, le robot revient à la position initiale. L'ensemble du circuit est contrôlé par le microcontrôleur.
Types de véhicules robotiques de lutte contre l'incendie:
Véhicule robotique de lutte contre l'incendie à domicile :
L'action sur le terrain est limitée à la Flore actuelle de la maison. Ce robot utilise de nombreux articles ménagers pour prendre feu lorsque quelqu'un dort ou est absent. Ce robot est utilisé pour sécuriser la maison et en utilisant cette application toutes les portes sont ouvertes à Flore car ce véhicule se déplace d'un endroit à un autre dans la maison. La zone de lutte contre l'incendie doit être sûre pour ne pas provoquer de nouvel accident. La caractéristique supplémentaire de ce robot est d'opérer à longue distance.
Lutte contre les incendies industriels:
La plupart des industries sont confrontées à des problèmes d'incendie, tels que le gaz, l'essence, les centrales nucléaires, les industries chimiques, d'énormes dégâts et un plus grand nombre de personnes est mort à proximité des zones environnantes. Ce robot a la force de transporter le feu à l'intérieur de la zone de combustion pour fournir de l'eau illimitée. Le feu provoque une visibilité réduite, une chaleur extrême et bien d'autres situations pouvant entraîner des blessures.
Lutte contre les incendies de forêt:
Les feux de forêt sont très dangereux. Cela peut prendre peu de temps pour brûler une grande superficie forestière. Même les services d'incendie de la ville doivent faire face aux incendies de forêt dans les environs de la ville. Il y a quelques années, environ 152 pompiers ont été tués dans les années 1990. La robotique des feux de forêt utilise pour attraper le feu et combattre le feu. Ce robot utilise un dispositif de contrôle externe à des fins de communication sans fil. Le module est connecté dont l'extrémité de sortie est utilisée pour l'extinction d'incendie de forêt du robot. Les applications telles que capteur de pression, capteur de température, capteur de smog, capteur infrarouge, sont utilisées pour contrôler le robot de lutte contre les incendies de forêt.
À l'invite!
Bien que j'aie donné une idée de base du robot avec un détecteur de métaux, une question majeure se pose toujours: comment guider le robot sur des terrains accidentés qui sont inconnus, en particulier dans des environnements soumis à de fortes pluies, à la poussière et à une plage de température chaude. Pour trouver une réponse et poster vos commentaires.