La modulation différentielle de code d'impulsion est une technique de à la conversion du signal numérique . Cette technique échantillonne le signal analogique puis quantifie la différence entre la valeur échantillonnée et sa valeur prédite, puis code le signal pour former une valeur numérique. Avant de discuter de la modulation différentielle du code d'impulsion, nous devons connaître les inconvénients de PCM (modulation de code d'impulsion) . Les échantillons d'un signal sont fortement corrélés les uns aux autres. La valeur du signal entre l’échantillon actuel et l’échantillon suivant ne diffère pas beaucoup. Les échantillons adjacents du signal portent les mêmes informations avec une petite différence. Lorsque ces échantillons sont codés par le système PCM standard, le signal codé résultant contient des bits d'information redondants. La figure ci-dessous illustre cela.

Bits d'information redondants dans PCM
La figure ci-dessus montre un signal de temps continu x (t) indiqué par une ligne pointillée. Ce signal est échantillonné par échantillonnage plat à des intervalles Ts, 2Ts, 3Ts… nTs. La fréquence d'échantillonnage est sélectionnée pour être supérieure à la fréquence de Nyquist. Ces échantillons sont codés à l'aide de PCM 3 bits (7 niveaux). Les échantillons sont quantifiés au niveau numérique le plus proche comme indiqué par de petits cercles sur la figure ci-dessus. La valeur binaire codée de chaque échantillon est inscrite en haut des échantillons. Observez simplement la figure ci-dessus lorsque les échantillons prélevés à 4T, 5T et 6T sont codés à la même valeur de (110). Ces informations ne peuvent être portées que par une seule valeur d'échantillon. Mais trois échantillons portent la même information signifie redondant.
Considérons maintenant les échantillons à 9Ts et 10Ts, la différence entre ces échantillons uniquement due au dernier bit et aux deux premiers bits est redondante puisqu'ils ne changent pas. Donc, afin de rendre le processus ces informations redondantes et d'avoir un meilleur résultat. C'est une décision intelligente de prendre une valeur échantillonnée prédite, supposée à partir de sa sortie précédente et de la résumer avec les valeurs quantifiées. Un tel processus est appelé une technique de PCM différentiel (DPCM).
Principe de la modulation différentielle par impulsions codées
Si la redondance est réduite, alors le débit binaire global diminuera et le nombre de bits requis pour transmettre un échantillon diminuera également. Ce type de technique de modulation d'impulsions numériques est appelé modulation de code d'impulsions différentielle. Le DPCM fonctionne sur le principe de la prédiction. La valeur de l'échantillon actuel est prédite à partir des échantillons précédents. La prédiction peut ne pas être exacte, mais elle est très proche de la valeur réelle de l'échantillon.
Modulation de code d'impulsion différentielle Émetteur
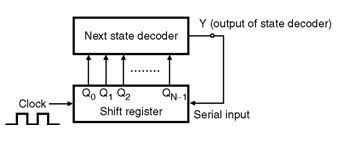
La figure ci-dessous montre l'émetteur DPCM. L'émetteur se compose de un comparateur , un quantificateur, un filtre de prédiction et un encodeur.

Modulateur de code d'impulsion différentiel
Le signal échantillonné est noté x (nTs) et le signal prédit est indiqué par x ^ (nTs). Le comparateur trouve la différence entre la valeur réelle de l'échantillon x (nTs) et la valeur prédite x ^ (nTs). Ceci est appelé erreur de signal et est noté e (nTs)
e (nTs) = x (nTs) - x ^ (nTs) ……. (1)
Ici, la valeur prédite x ^ (nTs) est produite en utilisant un filtre de prédiction (filtre de traitement du signal) . Le signal de sortie du quantificateur eq (nTs) et la prédiction précédente sont ajoutés et donnés en entrée au filtre de prédiction, ce signal est noté xq (nTs). Cela rapproche la prédiction du signal réellement échantillonné. Le signal d'erreur quantifié eq (nTs) est très petit et peut être codé en utilisant un petit nombre de bits. Ainsi, le nombre de bits par échantillon est réduit dans DPCM.
La sortie du quantificateur serait écrite comme suit:
éq (nTs) = e (nTs) + q (nTs) …… (2)
Ici, q (nTs) est une erreur de quantification. A partir du schéma fonctionnel ci-dessus, l'entrée de filtre de prédiction xq (nTs) est obtenue par la somme de x ^ (nTs) et de la sortie du quantificateur eq (nTs).
c'est-à-dire xq (nTs) = x ^ (nTs) + eq (nTs). ………. (3)
en substituant la valeur de eq (nTs) de l'équation (2) dans l'équation (3) on obtient,
xq (nTs) = x ^ (nTs) + e (nTs) + q (nTs) ……. (4)
L'équation (1) peut s'écrire,
e (nTs) + x ^ (nTs) = x (nTs) ……. (5)
à partir des équations 4 et 5 ci-dessus, nous obtenons,
xq (nTs) = x (nTs) + x (nTs)
Par conséquent, la version quantifiée du signal xq (nTs) est la somme de la valeur d'échantillon d'origine et de l'erreur quantifiée q (nTs). L'erreur quantifiée peut être positive ou négative. Ainsi, la sortie du filtre de prédiction ne dépend pas de ses caractéristiques.
Modulation de code d'impulsion différentielle Destinataire
Afin de reconstruire le signal numérique reçu, le récepteur DPCM (illustré dans la figure ci-dessous) se compose de un décodeur et filtre de prédiction. En cas d'absentéisme de bruit, l'entrée du récepteur codée sera la même que la sortie de l'émetteur codée.

Récepteur de modulation de code d'impulsion différentielle
Comme nous l'avons vu ci-dessus, le prédicteur prend une valeur, basée sur les sorties précédentes. L'entrée donnée au décodeur est traitée et cette sortie est additionnée à la sortie du prédicteur, pour obtenir une meilleure sortie. Cela signifie ici tout d'abord que le décodeur reconstruira la forme quantifiée du signal d'origine. Par conséquent, le signal au niveau du récepteur diffère du signal réel par une erreur de quantification q (nTs), qui est introduite en permanence dans le signal reconstruit.
| S. NON | Paramètres | Modulation de code d'impulsion (PCM) | Modulation de code d'impulsion différentielle (DPCM) |
| 1 | Nombre de bits | Il utilise 4, 8 ou 16 bits par échantillon | |
| deux | Niveaux, taille de pas | Taille de pas fixe. Ne peut pas varier | Un nombre fixe de niveaux est utilisé. |
| 3 | Redondance de bits | Cadeau | Peut supprimer définitivement |
| 4 | Erreur de quantification et distorsion | Dépend du nombre de niveaux utilisés | La distorsion de surcharge de pente et le bruit de quantification sont présents mais très inférieurs par rapport au PCM |
| 5 | La bande passante du canal de transmission | Une bande passante plus élevée est requise car le nombre de bits est absent | Bande passante inférieure à PCM |
| 6 | Retour d'information | Pas de rétroaction dans Tx et Rx | La rétroaction existe |
| sept | Complexité de la notation | Complexe | Simple |
| 8 | Rapport signal / bruit (SNR) | Bon | Équitable |
Applications de DPCM
La technique DPCM utilisait principalement la compression de la parole, de l'image et du signal audio. Le DPCM réalisé sur des signaux avec la corrélation entre échantillons successifs conduit à de bons taux de compression. Dans les images, il existe une corrélation entre les pixels voisins, dans les signaux vidéo, la corrélation est entre les mêmes pixels dans des trames consécutives et à l'intérieur des trames (ce qui équivaut à la corrélation à l'intérieur de l'image).
Cette méthode convient aux applications en temps réel. Comprendre l'efficacité de cette méthode de compression médicale et d'application en temps réel de l'imagerie médicale comme la télémédecine et le diagnostic en ligne. Par conséquent, il peut être efficace pour une compression sans perte et une mise en œuvre pour une compression d'image médicale sans perte ou presque sans perte.
Tout est question de fonctionnement de la modulation de code d'impulsion différentielle. Nous considérons que les informations données dans cet article vous sont utiles pour une meilleure compréhension de ce concept. De plus, toute question concernant cet article ou toute aide à la mise en œuvre projets électriques et électroniques , vous pouvez nous approcher en commentant dans la section commentaires ci-dessous. Voici une question pour vous, quel est le rôle du prédicteur dans la technique DPCM?