Dans cet article, nous apprenons un circuit de minuterie avant inverse pour faire fonctionner un mécanisme de moteur d'incubateur avec un ensemble préféré de mouvements. L'idée a été demandée par M. Anwar
Spécifications techniques
Je viens d'Indonésie ... J'ai besoin de schémas pour la minuterie d'incubateur avec moteur à couple élevé (fenêtre d'alimentation du moteur à courant continu dans la voiture). J'essaie de faire fonctionner un moteur à courant continu dans deux sens jusqu'à ce qu'il atteigne la position finale, puis de m'arrêter et de changer de polarité afin qu'il tourne dans l'autre sens lorsque l'alimentation est rétablie. Ensuite, faites la même chose à l'autre bout.
1. La minuterie met sous tension pendant 1 min. (De 7h00 à 7h00)
2. le moteur tourne dans un sens jusqu'à ce qu'il atteigne la position d'arrêt, disons 30 s.
3. l'alimentation du moteur s'arrête lorsqu'il atteint la position d'arrêt et retarde pendant 1 min. minuterie pour arrêter / éteindre l'alimentation principale. inverse également la polarité de sorte que.
4. la prochaine fois que la minuterie principale s'allume (10: 00-10: 01), elle dose la même chose dans le sens inverse et se répète en continu
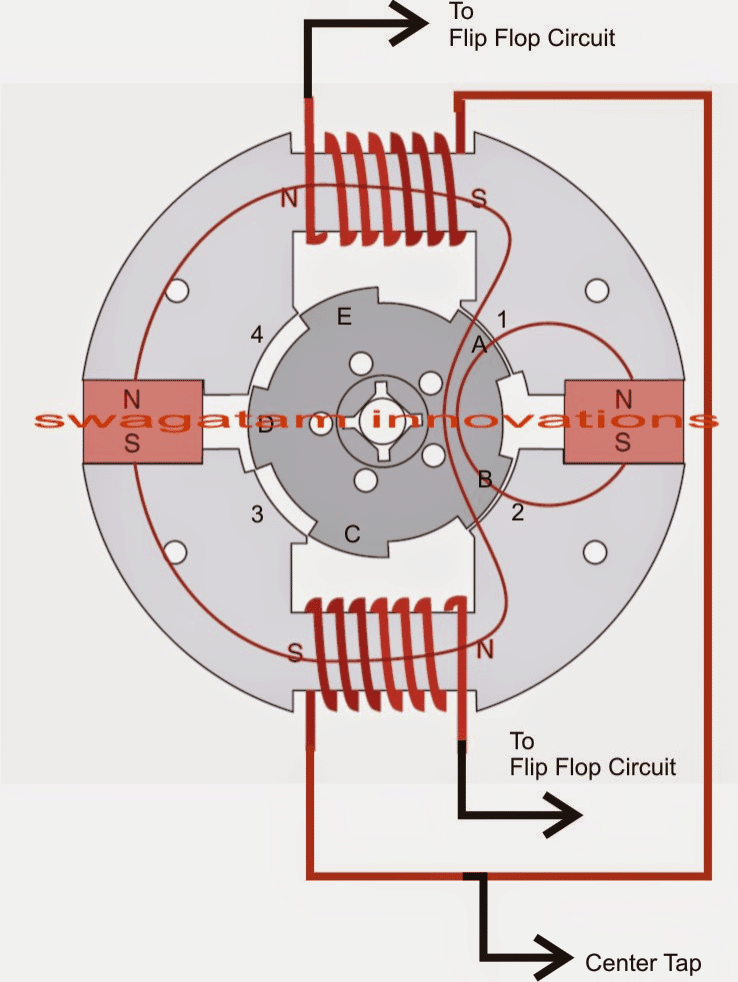
5. Inverser le moteur 12 VDC (juste deux câbles du moteur + et -)
6. Besoin d'un indicateur LED pour le moteur Rev / Fwd
Pouvez-vous m'aider monsieur?
Merci d'avance pour toute aide.
Il s'agit d'un projet de maison important qui doit être fiable à 100%.
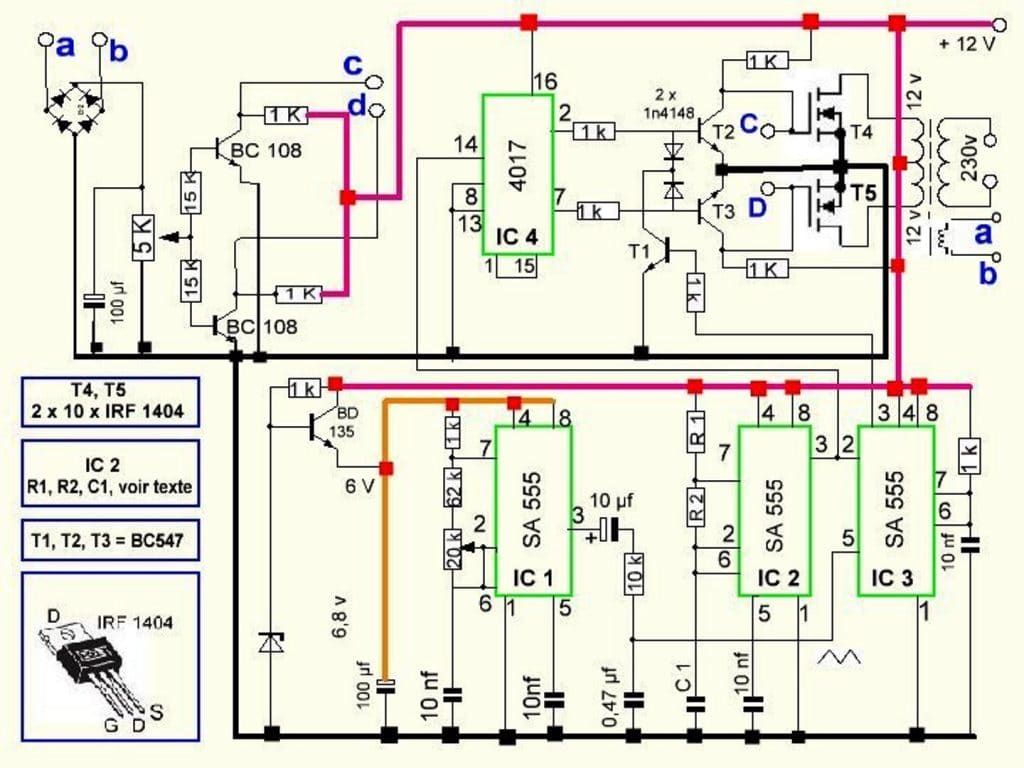
La conception

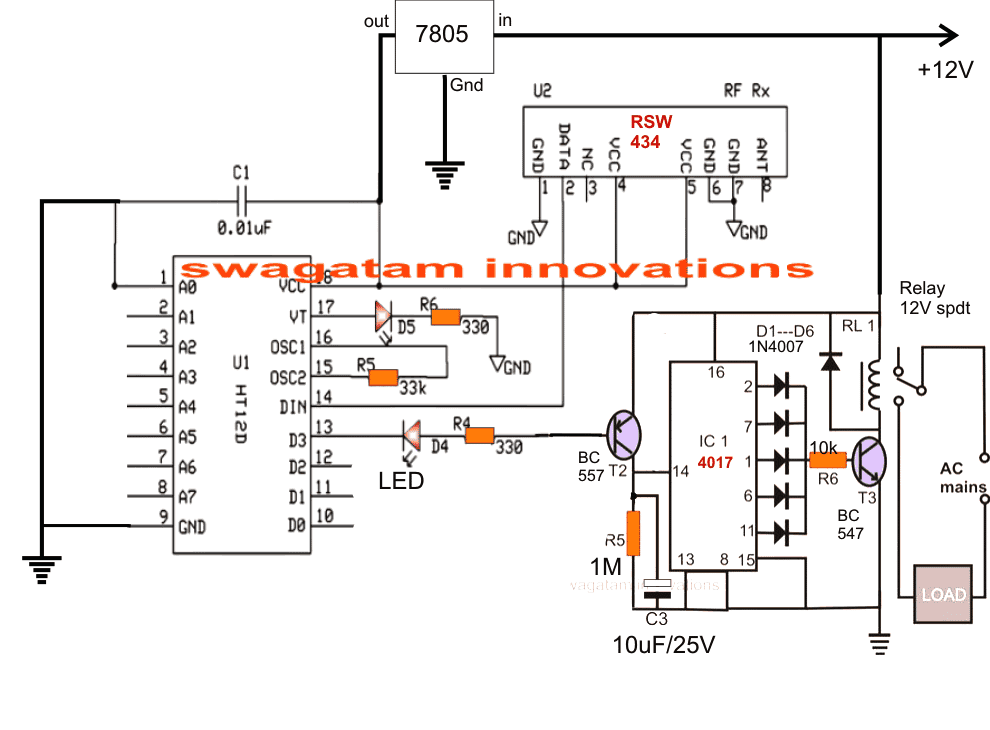
Dans la figure ci-dessus, nous pouvons visualiser une conception pour mettre en œuvre le mouvement inverse vers l'avant proposé d'un moteur d'incubateur après un ensemble prédéterminé d'intervalle de temps.
Au moment de la mise sous tension, nous avons le scénario suivant:
L'interrupteur magnétique pour «set» peut être supposé être dans un état désactivé ou enfoncé alors que le moteur ou le mécanisme d'incubateur conçu est dans sa position de démarrage zéro.
Veuillez noter que de préférence, les commutateurs «set» / «reset» doivent être mis en œuvre à l'aide de commutateurs magnétiques.
Lorsque l'alimentation est allumée, l'IC 4060 est réinitialisé via C2 de sorte qu'il lance le processus de comptage à partir de zéro, et la broche3 devient une logique zéro.
Cette logique zéro initial est envoyée via C3 à la base de T1 qui conduit instantanément à forcer T3 et son relais associé à s'activer. R7 dans le processus garantit que T1 / T3 est verrouillé dans ce mode.
Le relais DPDT à ce stade actionne à ses contacts N / O initiant le moteur et le mécanisme vers un mouvement supposé «vers l'avant».
Dès que le moteur commence à bouger, le bouton `` set '' est relâché de telle sorte que T4 et le SPDT supérieur aient la possibilité de s'actionner, le relais SPDT atteignant un changement de position N / O rendant les contacts N / C du DPDT en veille. fournir..
Le moteur et / ou le mécanisme continue de bouger jusqu'à ce qu'il ait atteint la position de «réinitialisation» qui amène T2 à activer et à rompre le verrou T1 / T4.
Lorsque T4 est désactivé, le relais DPDT change sa position de N / O à N / C et fournit un mouvement opposé (inverse) au mécanisme du moteur.
Le mécanisme du moteur de l'incubateur change maintenant sa direction et initie un mouvement inverse jusqu'à ce qu'il ait atteint le point de `` consigne '' qui éteint rapidement l'entraînement de base du T4, le SPDT coupe l'alimentation de coupe du DPDT et l'ensemble du mécanisme s'arrête. .
Pendant ce temps, l'IC 4060 continue de compter jusqu'à ce qu'il ait à nouveau produit une logique zéro après avoir traversé une logique haute sur sa broche 3 (en déchargeant C3).
Le cycle est à nouveau lancé et répète la procédure comme expliqué ci-dessus.
Précédent: Faire clignoter une LED avec Arduino - Tutoriel complet Un article: Suppresseur de surtension secteur industriel haute puissance exploré