Avec le développement des technologies, en particulier dans la technologie robotique, les robots sont prédominants dans de nombreuses applications. Certains d'entre eux sont d'un type à haut risque et des zones dangereuses. Les applications militaires et de champ de bataille utilisent désormais de plus en plus des robots pour certaines tâches cruciales et complexes. Dans l'un de mes articles, j'ai décrit l'utilisation de robots comme espion dans les opérations militaires. Maintenant, que se passe-t-il s'il est nécessaire de défendre le véhicule robotique ou une attaque du robot? C'est là qu'intervient le besoin d'un robot intégré avec un mécanisme d'attaque. Un tel exemple est le véhicule robotique avec un pistolet LASER.

Véhicule robotique contrôlé par RF avec disposition du faisceau laser
Un tel robot est essentiellement utilisé dans les opérations militaires et également par la police de la circulation pour détecter la vitesse des véhicules en mouvement.
Avant d'entrer dans les détails sur les robots avec des pistolets laser, voyons rapidement le LASER en tant qu'arme.
Un faisceau LASER (Light Amplification by Stimulation Emission) est une lumière unidirectionnelle fortement focalisée contrairement à celle d'une simple ampoule. Il se compose de creux et de crêtes synchronisés, c'est-à-dire que les vagues n'interfèrent pas les unes avec les autres. Cela produit une lumière fortement focalisée de très haute puissance de l'ordre de 1000 à 1 million de fois plus grande qu'une ampoule classique. C'est un appareil qui contrôle l'émission et l'absorption des photons en pompant des quantités d'énergie suffisantes. En cela, la source de photons est amplifiée en un faisceau de lumière. La longueur d'onde de ces lasers varie en différents spectres comme le visible, l'infrarouge et l'ultraviolet.
Le principe derrière le LASER tourne autour de trois choses: l'absorption, l'émission spontanée et l'émission stimulée. Une quantité adéquate d'énergie provenant du photon interagit avec l'atome, faisant passer l'atome d'un état d'énergie inférieure à un état d'énergie supérieur. Cet atome revient à l'état d'énergie inférieure en émettant un photon appelé émission spontanée. Dans l'émission stimulée, il y a la libération d'énergie de l'atome par des moyens artificiels. ainsi le photon interagit avec l'atome excité, a la même énergie et polarisation que le photon incident.
Voyons maintenant les pièces matérielles du robot
- Base: La base d'un tel robot peut être n'importe quel corps cubique avec des roues fixées pour son mouvement.
- Docteur moteur: Le robot se compose de deux moteurs à courant continu entraînés par les pilotes de moteur et fournit le mouvement requis au robot.
- Unité de contrôle: Le mouvement du robot est contrôlé à l'aide d'un module de communication RF. L'émetteur se compose de boutons-poussoirs, de microcontrôleurs, d'un décodeur et d'un émetteur RF tandis que l'unité de réception intégrée au robot se compose d'un encodeur et d'un module récepteur RF pour contrôler le mouvement robotique .
- Un pistolet LASER: Un pistolet LASER est monté sur le robot qui effectue la tâche principale du robot.
Un aperçu du fonctionnement du robot
Le robot tout en se déplaçant dans la direction requise tire un puissant faisceau lumineux du pistolet LASER qui peut soit endommager la cible, soit simplement produire un point pour détecter la cible. Le LASER doit être alimenté par certaines sources d'énergie. Dans une conception de prototype simple utilisant un stylo LASER de base, l'appareil est entraîné par un transistor agissant comme un interrupteur. Le transistor reçoit le signal logique bas du microcontrôleur et est à l'état bloqué, ce qui rend le module LASER directement connecté à l'alimentation 5 V.

Pistolet laser entraîné par un transistor fonctionnant comme un inverseur
Contrôle du robot
Pour contrôler le mouvement du robot, le fonctionnement des moteurs doit être contrôlé. Cela peut être fait en utilisant une opération contrôlée par RF des pilotes de moteur. Les commandes sont transmises à l'aide d'un émetteur RF à une certaine unité de distance d'environ 200 mètres et reçues par le récepteur RF pour entraîner les moteurs.
L'unité émettrice se compose de plusieurs boutons poussoirs qui agissent comme des interrupteurs de commande pour déplacer le robot dans n'importe quelle direction souhaitée. Les boutons-poussoirs sont interfacés avec le microcontrôleur, qui est programmé pour envoyer des données sous forme parallèle sur la base de l'entrée du bouton-poussoir, au codeur. Le codeur convertit ces données parallèles en forme série et ces données série sont transmises à l'aide du module émetteur RF à travers une antenne.

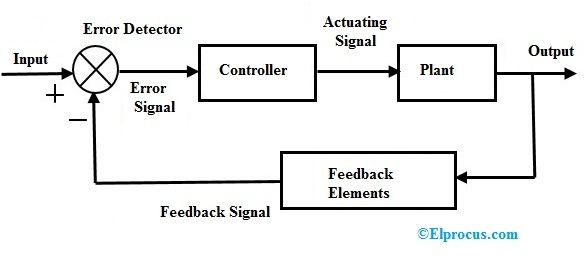
Schéma fonctionnel montrant la section de l'émetteur
L'unité de réception est constituée d'un module récepteur RF qui reçoit le signal modulé et le démodule. Le décodeur reçoit le signal démodulé sous forme série et le convertit en forme parallèle. Le microcontrôleur reçoit les signaux et commande le pilote de moteur en conséquence. Le pilote de moteur utilisé dans LM293D qui peut contrôler 2 moteurs à la fois.

Schéma fonctionnel montrant la section du récepteur
Ainsi, en utilisant la communication RF, nous pouvons contrôler le robot.
Dans les descriptions ci-dessus, j'ai donné une brève idée d'un prototype simple d'un véhicule robotique avec un faisceau LASER. Dans les applications réelles, des systèmes de communication à longue portée comme GSM ou DTMF sont normalement utilisés pour contrôler le robot depuis des endroits éloignés.
3 applications du véhicule robotique avec pistolet laser:
- Détection de cible : Le véhicule robotique peut utiliser le faisceau LASER pour créer une tache sur la cible, de sorte qu'elle soit facilement visible et puisse être ciblée. Un exemple est l'Air Borne LASER.
- Destruction de la cible : Une forte Faisceau laser de l'ordre de 95 GHz peut provoquer une sensation de brûlure dans le corps humain car il pénètre dans la peau de 1/64ed'un pouce et l'énergie du faisceau peut chauffer les molécules d'eau dans le corps. Un exemple est le système de déni actif développé par les États-Unis.
- Télémètre cible et détection de vitesse : Le faisceau LASER du véhicule robotique peut être utilisé pour trouver la portée de la cible par le principe de la réflexion de la lumière LASER et aussi la vitesse de la cible peut être calculée une fois que nous pouvons obtenir la portée.
Alors maintenant, nous avons une brève idée des robots qui ont utilisé un détecteur de cible et un destroyer. A-t-il une utilité pour le public normal autre que seulement l'armée? Réfléchissez et répondez.